@jugg 和22.04支持情况是一样的。
G
Posts
-
RE: Coolpi 4b在使用ttyS0-S2口时,总是出现串口掉线,使用很不稳定,这个是为什么呢?有解决方案吗?posted in Pi 4B
@零度灬救赎 刚才我在debian上测试,没有发现你描述的问题
-
RE: Coolpi 4b在使用ttyS0-S2口时,总是出现串口掉线,使用很不稳定,这个是为什么呢?有解决方案吗?posted in Pi 4B
@零度灬救赎 提供一下系统版本和串口端口号。测试一下尽快反馈。
-
RE: Coolpi 4b在使用ttyS0-S2口时,总是出现串口掉线,使用很不稳定,这个是为什么呢?有解决方案吗?posted in Pi 4B
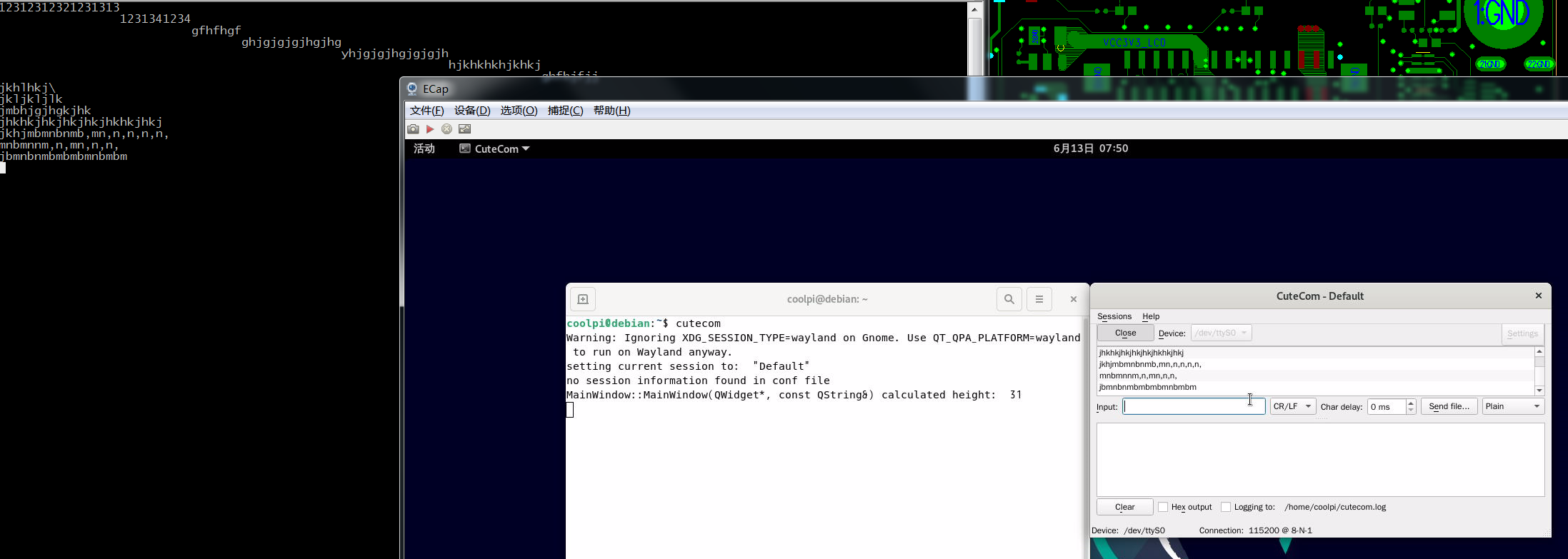
@零度灬救赎 这个是应用层报错,确认一下内核有没有错误。可以先通过第三方工具(比如minicom)测试。
-
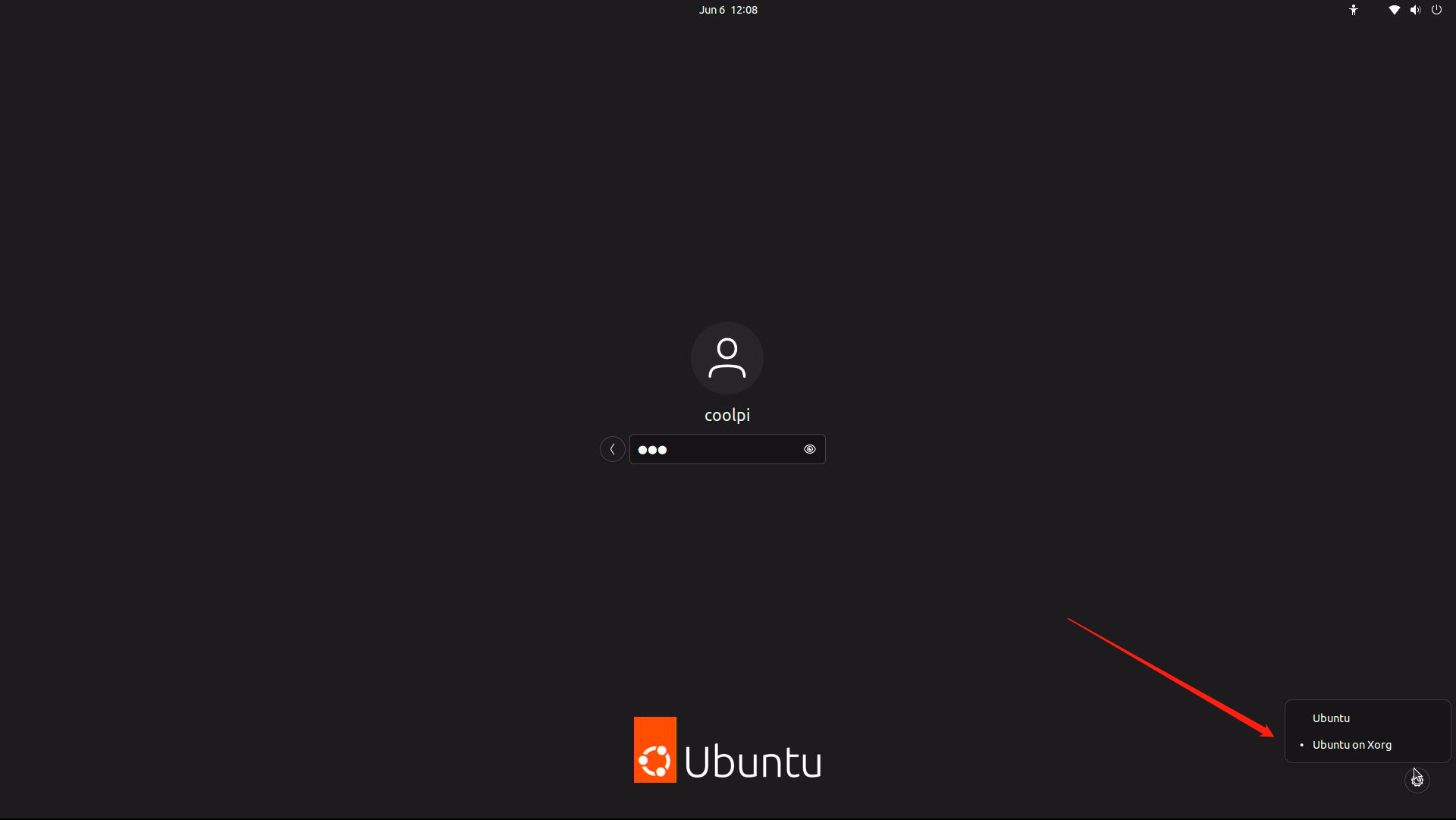
CP4/CM5 debian11 gnome image releaseposted in Pi CM5
Adaptation situation:
-
Open source GPU driver
-
RKMPP video hardware decoding
-
RK RGA Hardware acceleration
-
RK NPU supports C++/Python interface calls
-
Integrated Chromium web browser
-
Integrate the Gstreamer Multimedia framework and support calling RKMPP
-
Integrated FFMPEG Multimedia framework, supporting calling RKMPP
-
RK ISP Application Layer Service Support
-
Compatible with X11/WAYLAND display frame

-
-
RE: Coolpi 4b在使用ttyS0-S2口时,总是出现串口掉线,使用很不稳定,这个是为什么呢?有解决方案吗?posted in Pi 4B
@零度灬救赎 串口掉线什么意思。请描述一下具体情况。
-
RE: Ubuntu23.04 for CoolPiposted in Pi CM5
@wuming 如果你是CM5-V11的机器,默认的loader是可以进入UMS模式的,短按一下rst按键,然后持续多次按pwr按键。
-
RE: Ubuntu23.04 for CoolPiposted in Pi CM5
@wuming 重启是按最左边的rst按键。loader按键会进入maskrom模式用于升级loader文件。按照文档操作。
-
RE: Ubuntu23.04 for CoolPiposted in Pi CM5
@wuming 如下图所示正常进入UMS的log信息。
-0 2 1 3 6 8 7 9 Monitor has basic audio support hdmi info isn't saved in main block mode:1920x1080 bus_format:0x100a hdmi@fde80000: detailed mode clock 148500 kHz, flags[5] H: 1920 2008 2052 2200 V: 1080 1084 1089 1125 bus_format: 100a VOP update mode to: 1920x1080p0, type: HDMI0 for VP0 dclk:148500,if_pixclk_div;2,if_dclk_div:4 rockchip_vop2_init: hdmi0_phy_pll may not define rockchip_vop2_init: hdmi1_phy_pll may not define assigned-clock-parents's node not define VP0 set crtc_clock to 148500KHz VOP VP0 enable Esmart0[356x124->356x124@782x478] fmt[1] addr[0xedf21000] CEA mode used vic=16 mtmdsclock:148500000 bus_width:0x16a8c8,bit_rate:1485000 hdptx_ropll_cmn_config bus_width:16a8c8 rate:1485000 hdptx phy pll locked! hdptx phy lane locked! dw_hdmi_setup HDMI mode don't use dsc mode dw hdmi qp use tmds mode boot mode: None Net Initialization Skipped Autoboot in 1 seconds VOP VP0 enable Esmart0[356x124->356x124@782x478] fmt[1] addr[0xedf21000] Power Key Setting Enter UMS mode! UMS: LUN 0, dev 0, hwpart 0, sector 0x0, count 0x747c000 -建议先吧loader更新到最新,老版本的不支持UMS方式烧录。参照如下文档:
https://www.cool-pi.com/topic/162/how-to-upgrade-the-boot-loader-of-coolpi-4b -
RE: How to enable PCIe Endpoint Mode?(CM5 ubuntu 22.05)posted in Pi CM5
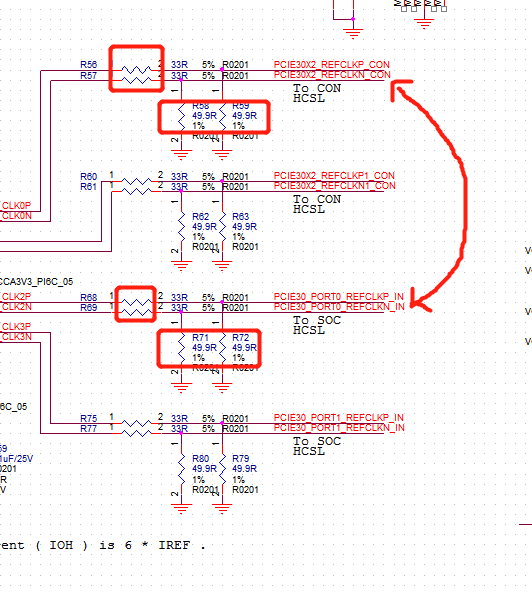
@blank Sorry, there was an issue with the reply yesterday. Currently, only the M2 interface has EP functionality. The hardware operation is shown in the following figure (the clock directly skips the PLL chip), and the software can be modified as follows.
diff --git a/arch/arm64/boot/dts/rockchip/rk3588-cpcm5-evb-v11.dts b/arch/arm64/boot/dts/rockchip/rk3588-cpcm5-evb-v11.dts index 5b04c9d3f354..3c4ff40742e7 100755 --- a/arch/arm64/boot/dts/rockchip/rk3588-cpcm5-evb-v11.dts +++ b/arch/arm64/boot/dts/rockchip/rk3588-cpcm5-evb-v11.dts @@ -1297,6 +1297,7 @@ &sata1 { //ssd &pcie3x4 { + compatible = "rockchip,rk3588-pcie-ep", "snps,dw-pcie"; num-lanes = <2>; reset-gpios = <&gpio4 RK_PB6 GPIO_ACTIVE_HIGH>; vpcie3v3-supply = <&vcc3v3_sys>; -
RE: Ubuntu23.04 for CoolPiposted in Pi CM5
@wuming 确认loader是否已经升级到最新,机器和电脑通过USB线连接。重新上电,迅速多次按pwr按键。
-
RE: How to enable PCIe Endpoint Mode?(CM5 ubuntu 22.05)posted in Pi CM5
@blank The PCIE ep mode requires modifications to the software and hardware, and the software dts configuration is sufficient. The hardware modification RC clock is directly connected to RK3568. The current board hardware configuration can only work in RC mode.
diff --git a/arch/arm64/boot/dts/rockchip/rk3588-cpcm5-evb-v11.dts b/arch/arm64/boot/dts/rockchip/rk3588-cpcm5-evb-v11.dts index 5b04c9d3f354..4da6083e288a 100755 --- a/arch/arm64/boot/dts/rockchip/rk3588-cpcm5-evb-v11.dts +++ b/arch/arm64/boot/dts/rockchip/rk3588-cpcm5-evb-v11.dts @@ -1305,6 +1305,7 @@ &pcie3x4 { //express &pcie3x2 { + compatible = "rockchip,rk3588-pcie-ep", "snps,dw-pcie"; reset-gpios = <&gpio3 RK_PB0 GPIO_ACTIVE_HIGH>; vpcie3v3-supply = <&vcc3v3_sys>; status = "okay"; -
RE: coolpi 4b(ubuntu20.04系统)如何做超频设置(最高能提高到多少?)?posted in Pi 4B
@零度灬救赎 目前2.4G最高,不支持再超到更高频率。强行超频可能会导致CPU物理损坏。建议增加散热措施,让CPU持续工作在高频即可。
-
RE: CSI支持posted in Pi CM5
@wuming 按照如下方法操作,格式化EMMC
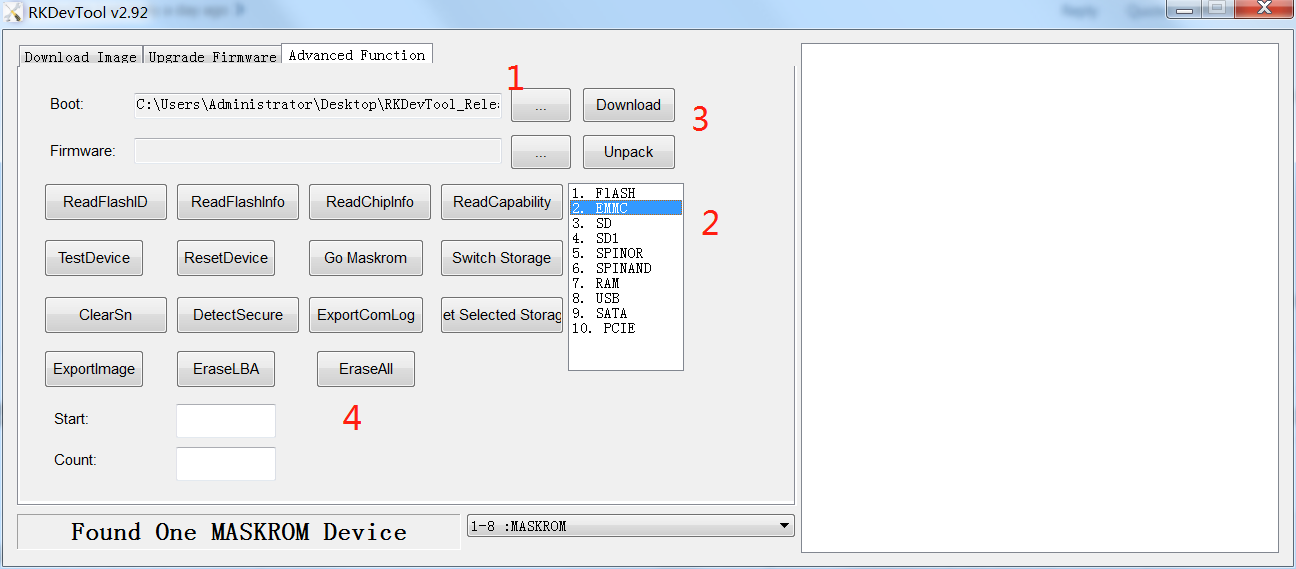
1.按住中间的loader按键同时短按复位按键,机器就会进入maskrom模式,如下图所示:
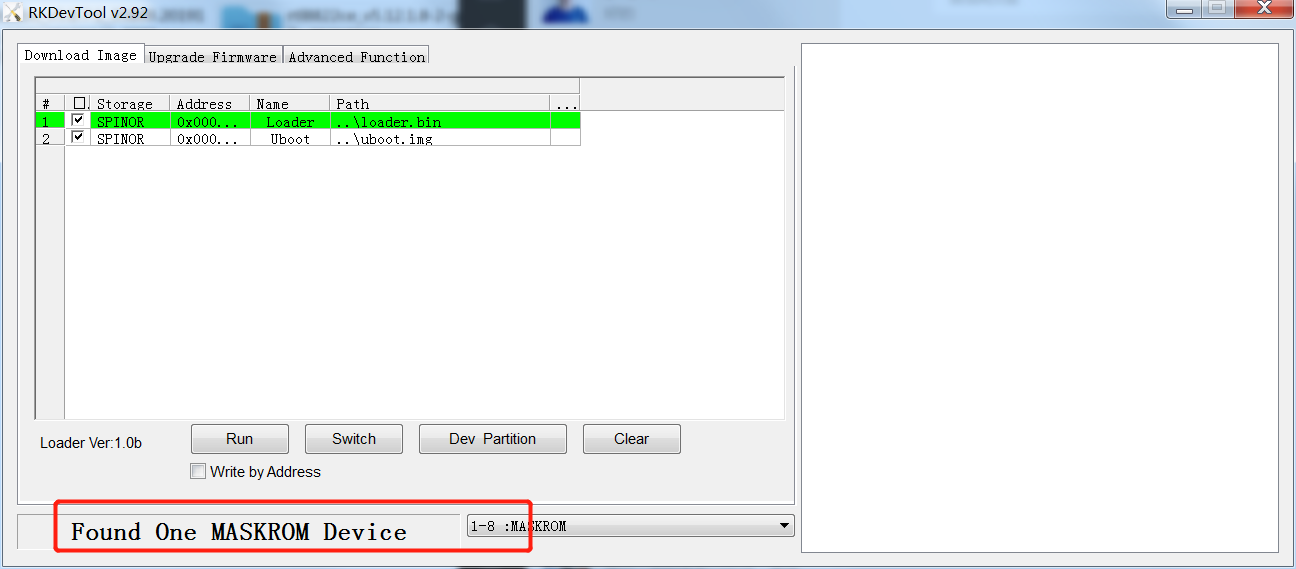
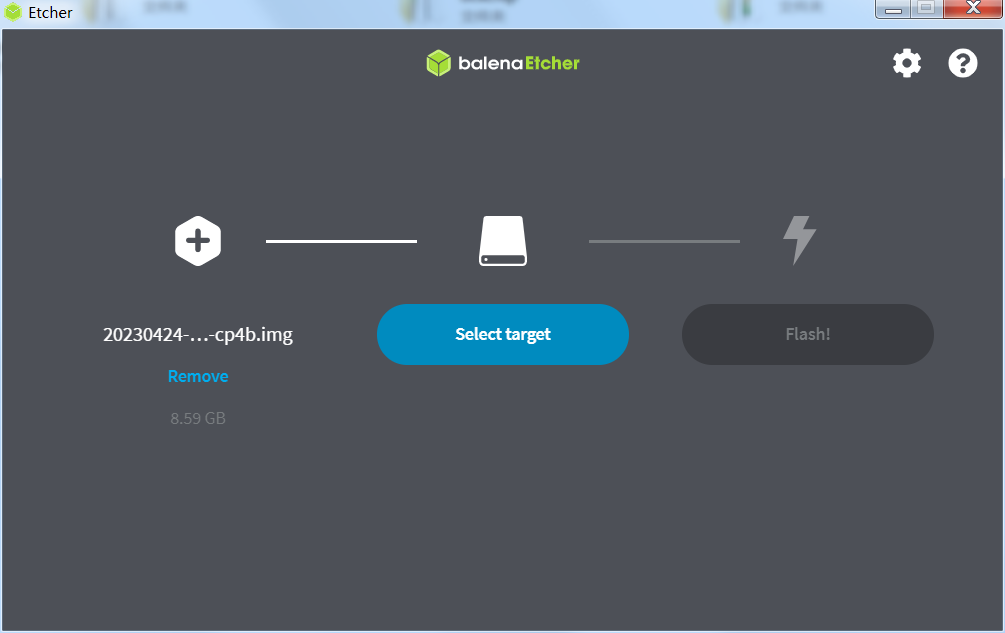
2.选择loader文件,选择EMMC,点击download,等待完成以后点击Eraseall。即可完成EMMC擦除。
3.短按复位按键,快速按三次pwr按键,机器就会进入MSC模式
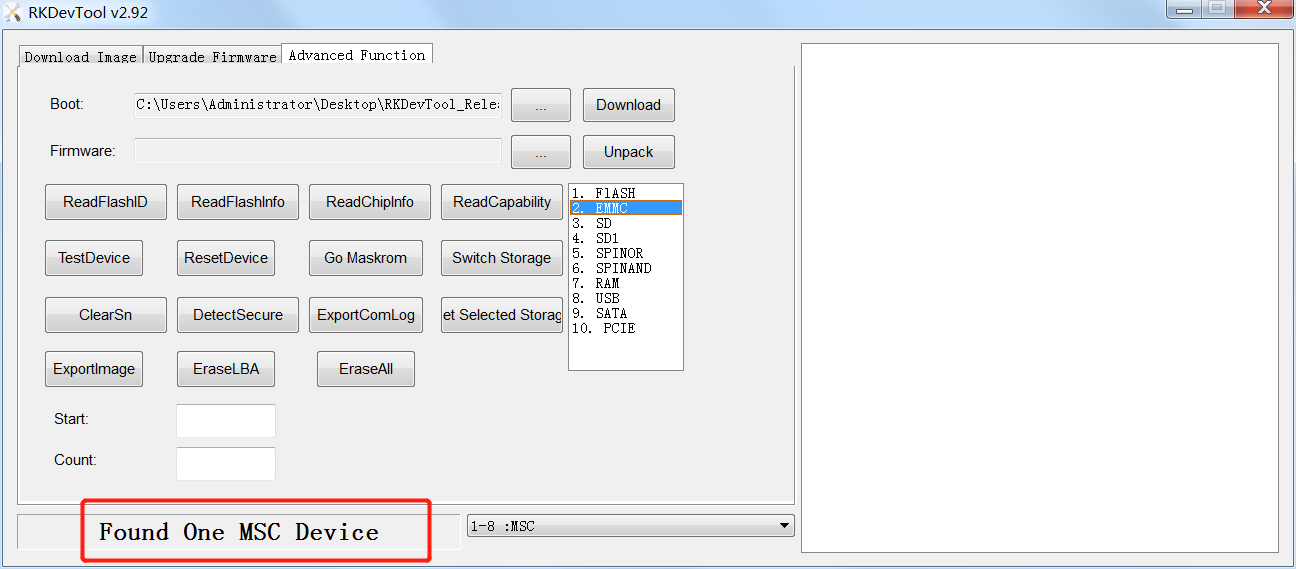
4.使用etcher选择固件和MSC设备烧录即可。