@jugg 自己修改一下fstab。
G
Posts
-
RE: CoolPi 4B硬件扩展四:GPIOposted in Hardware
@zensation
The current operation method does not support configuring the up and down status. If you need to modify the up and down status of GPIO, you can use DTS's PINCTRL to achieve it.lcd { lcdpwr_en: lcdpwr-en { rockchip,pins = <1 RK_PC4 RK_FUNC_GPIO &pcfg_pull_down>; }; bl_en: bl-en { rockchip,pins = <4 RK_PA3 RK_FUNC_GPIO &pcfg_pull_none>; }; }; -
RE: CoolPi 4B硬件扩展四:GPIOposted in Hardware
@zensation
First, set the password for the root user, and then log in as root.coolpi@Ubuntu:~$ sudo passwd root [sudo] password for coolpi: New password: BAD PASSWORD: The password is shorter than 8 characters Retype new password: passwd: password updated successfully coolpi@Ubuntu:~$ su Password: root@Ubuntu:/home/coolpi# echo 128 > /sys/class/gpio/export root@Ubuntu:/home/coolpi# cd /sys/class/gpio/ root@Ubuntu:/sys/class/gpio# ls export gpiochip0 gpiochip32 gpiochip64 unexport gpio128 gpiochip128 gpiochip509 gpiochip96 root@Ubuntu:/sys/class/gpio# -
RE: CoolPi 4B硬件扩展四:GPIOposted in Hardware
@zensation
Can you be more specific about which commands are not working. -
RE: merge back to armbian sourceposted in Armbian
@reddfoxx
Thank you for your suggestion. As I haven't paid too much attention to ARMBIAN, I have only tried to develop the corresponding firmware. Currently, my main focus is on Ubuntu Debian Android and the optimization and expansion of the upper and lower layers of the system. You can try adding the Armbian mainline in the future. -
RE: is there a available kernel with hibernate mode enabled to allow for faster booting?posted in Pi 4B
@zensation
The firmware I tested is the latest version 20230613, and you can check if there is a problem with your power adapter causing the reboot. -
RE: is there a available kernel with hibernate mode enabled to allow for faster booting?posted in Pi 4B
@zensation
I tested the latest image of ubuntu22.04 and did not find the problem you described. As shown in the following figure, the PWR button is configured as suspend. The first press to enter sleep can be seen from the log information, and the second press to wake up the system.
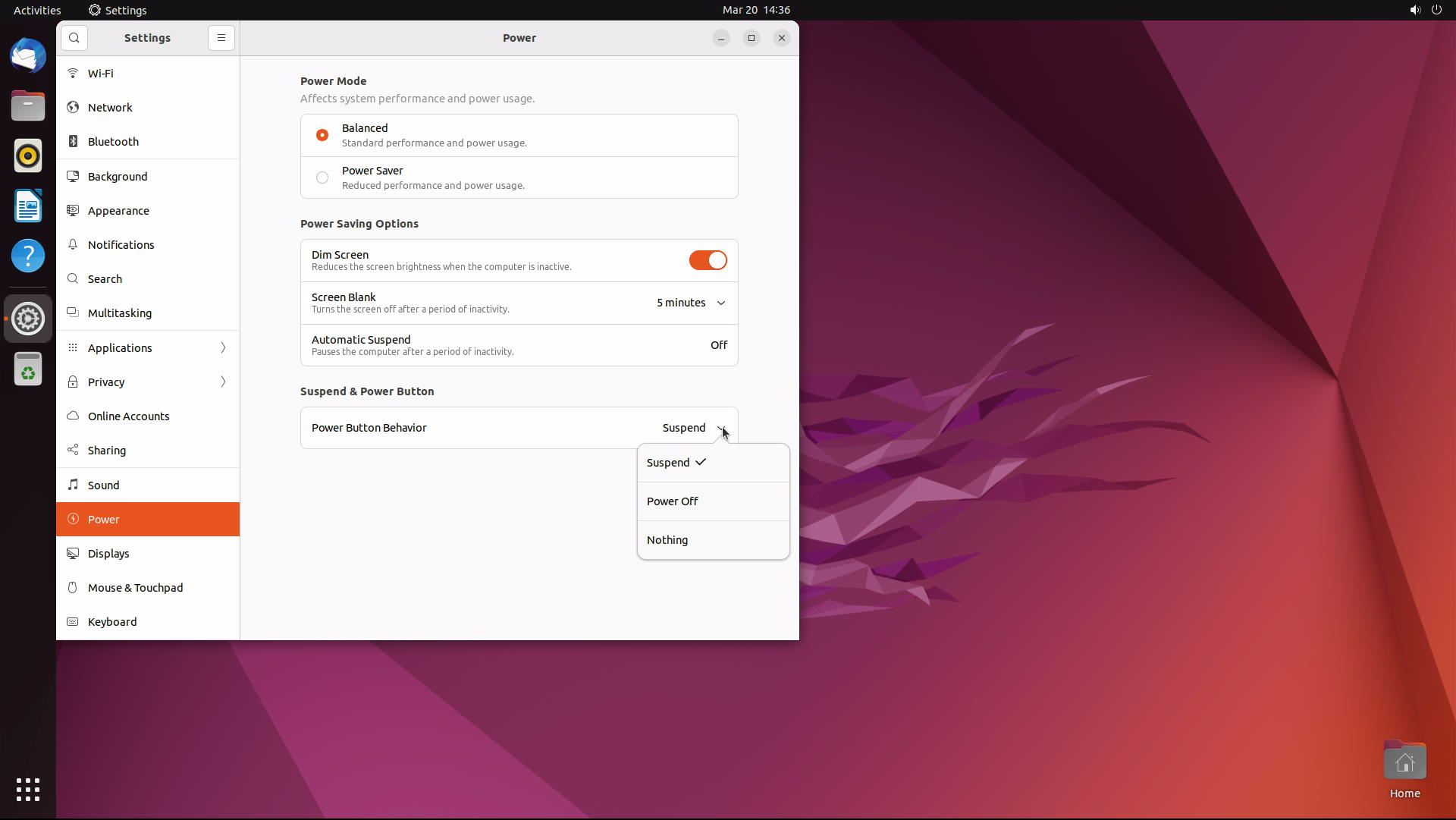
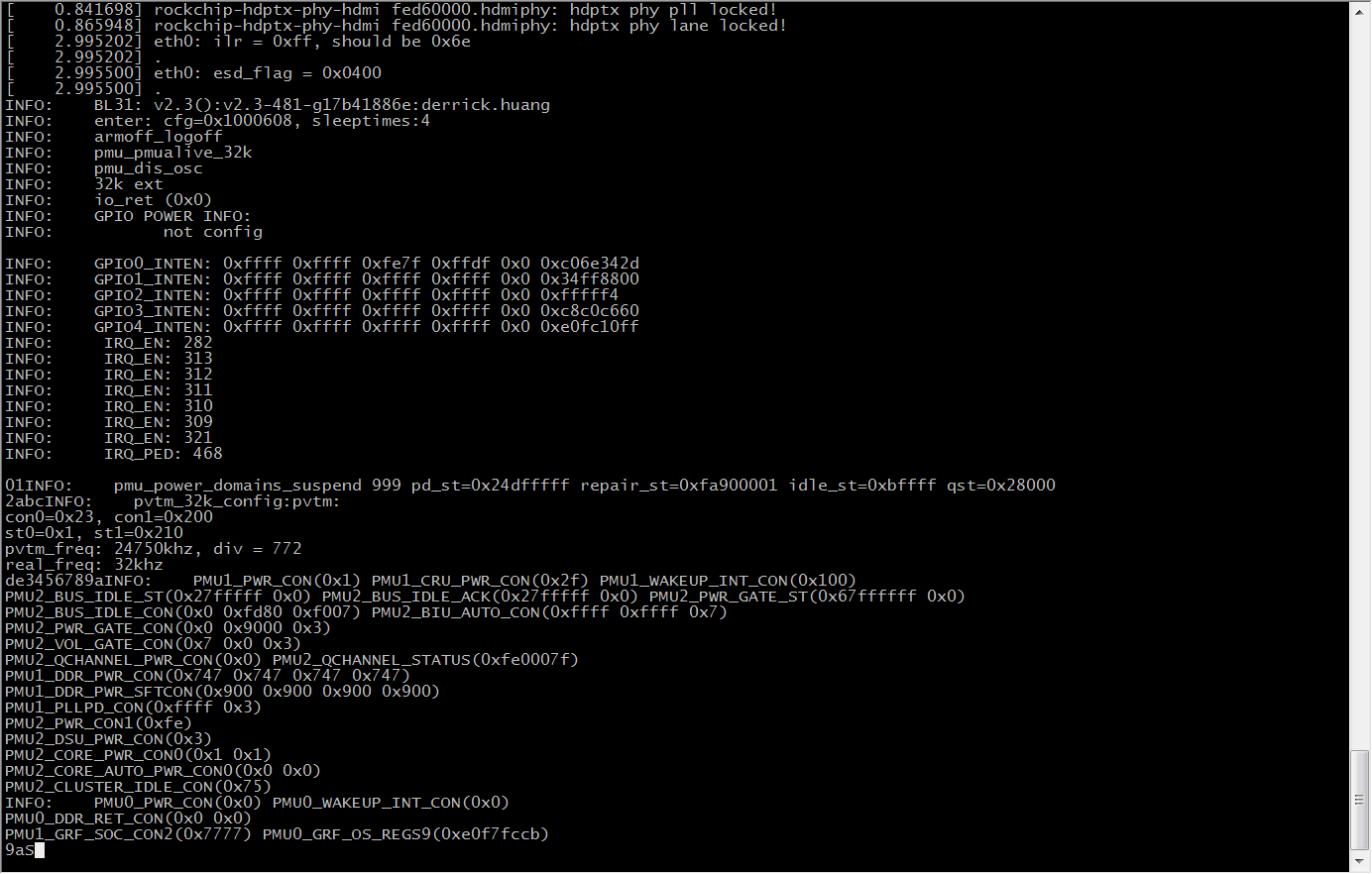
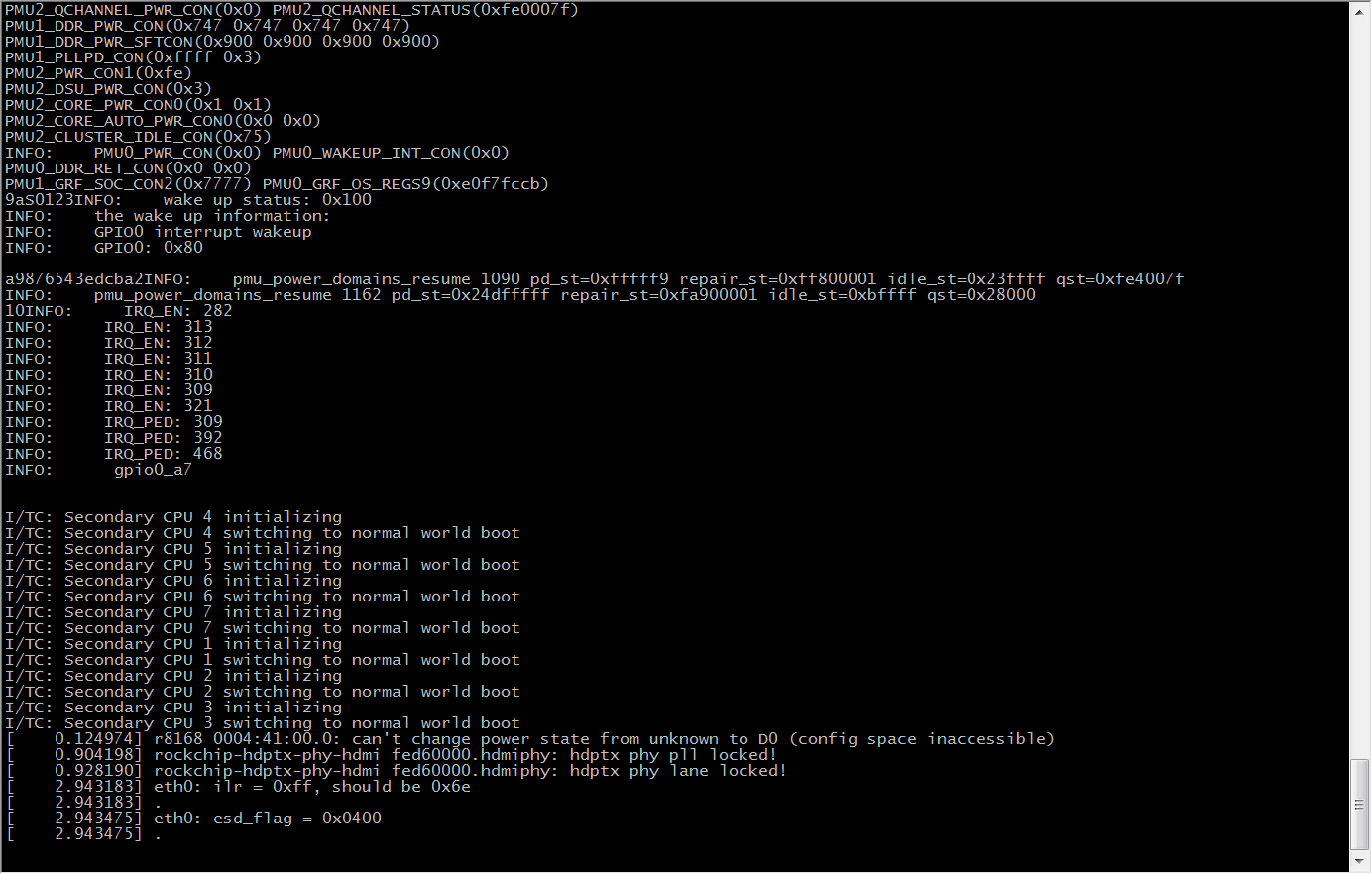
-
RE: is there a available kernel with hibernate mode enabled to allow for faster booting?posted in Pi 4B
@zensation I will confirm the CP4 machine and reply to you with the results later.
-
RE: is there a available kernel with hibernate mode enabled to allow for faster booting?posted in Pi 4B
@zensation The latest images can support suspend operations, including ubuntu. Are you using CP4 or CM5
-
RE: is there a available kernel with hibernate mode enabled to allow for faster booting?posted in Pi 4B
@zensation At present, when the machine enters suspend mode, all power supplies in the system will be turned off, and only the memory self refresh function will be retained. Currently, there is no support for exporting the memory data you described to the hard drive.
-
RE: is there a available kernel with hibernate mode enabled to allow for faster booting?posted in Pi 4B
@zensation The latest kernel currently supports sleep mode. Please describe the specific operating scenarios required.
-
RE: How to enable PCIe Endpoint Mode?(CM5 ubuntu 22.05)posted in Pi CM5
@blank Official document description: The pcie30x4 controller operates in EP mode and can be used in 4Lane mode or 2Lane mode using pcie30phy's port0. The 2lane in pcie30phy's port1 can be used as an RC in conjunction with other controllers.
- The SSD of the CM5 machine corresponds to the PCIE30 PORT0 interface