@大法师 感谢!完美解决我的问题!

已找到/dev/input/js0
更新内核方法在下面,方便其他新手朋友操作
https://www.cool-pi.com/topic/131/coolpi-4b-linux-kernel开发在线更新说明
@大法师 感谢!完美解决我的问题!
已找到/dev/input/js0
更新内核方法在下面,方便其他新手朋友操作
https://www.cool-pi.com/topic/131/coolpi-4b-linux-kernel开发在线更新说明
@AugustRobot_Zou said in How to upgrade the boot loader of coolpi 4b?:
Since I upgraded my PC to Win11, the RKDevTool always cannot find the device of coolpi-4b.
Does the RKDevTool support Win11?
Or could I upgrade the boot loader of coolpi-4b in ubuntu environment?
https://www.cool-pi.com/topic/47/coolpi-4b-bootloader命令行升级方法
用这个办法升级成功,避开RKDevTool 在win11驱动问题
@大法师 更新情况!
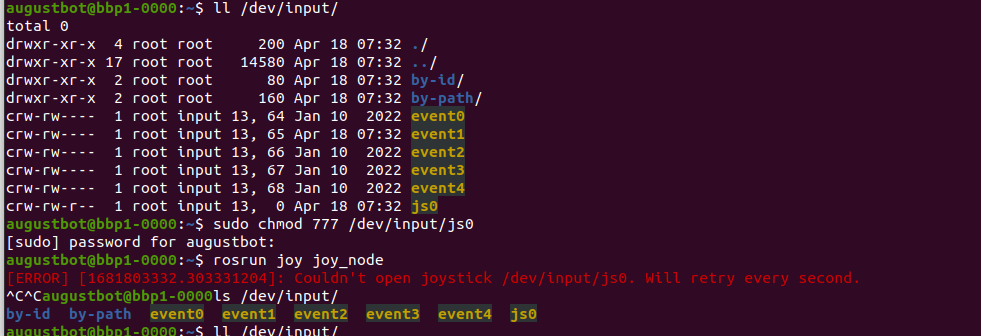
还是使用不了,会出现 Couldn't open Joystick /dev/input/js0的报错。
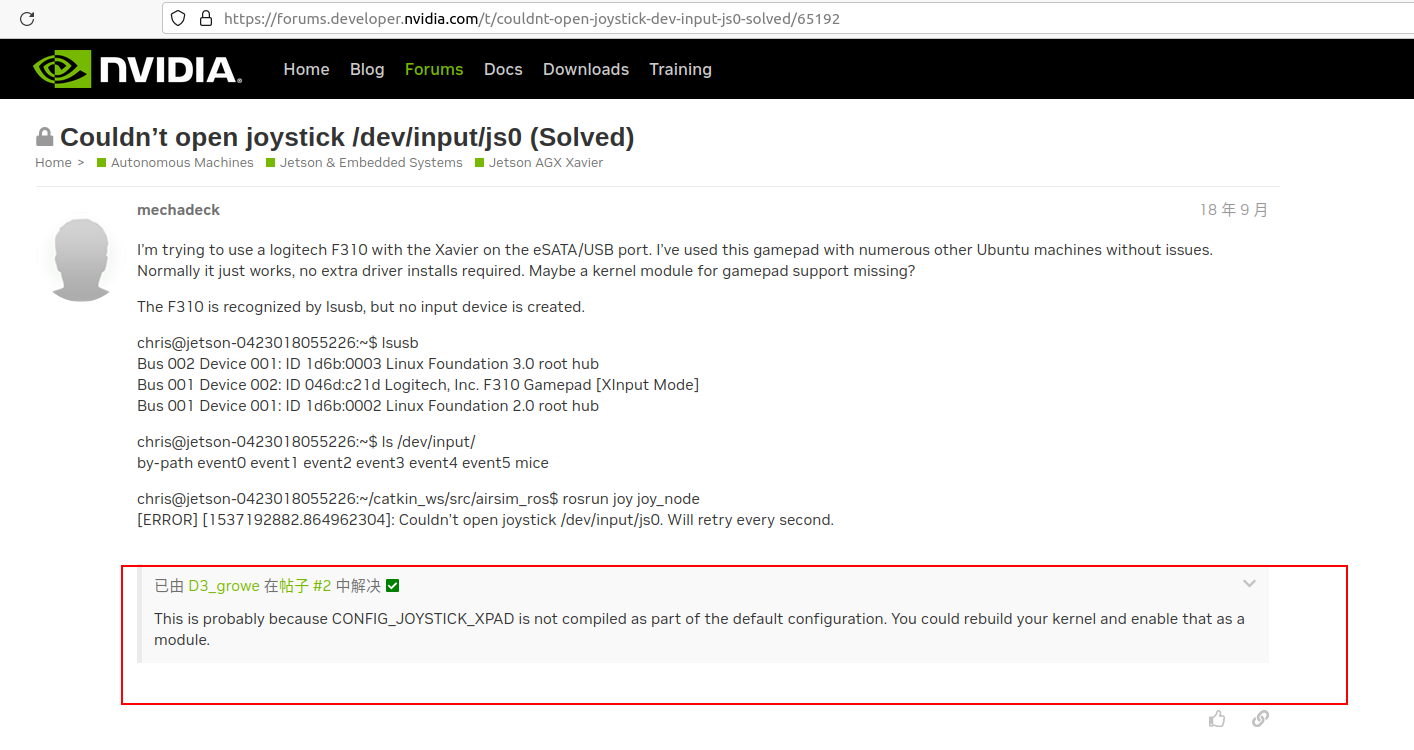
经过google后解决:
https://forums.developer.nvidia.com/t/couldnt-open-joystick-dev-input-js0-solved/65192
帖子说需要多编译一个CONFIG_JOYSTICK_XPAD=y
于是我搜索后,发现rockchip_defconfig里面有三行
ONFIG_JOYSTICK_XPAD=y
CONFIG_JOYSTICK_XPAD_FF=y
CONFIG_JOYSTICK_XPAD_LEDS=y
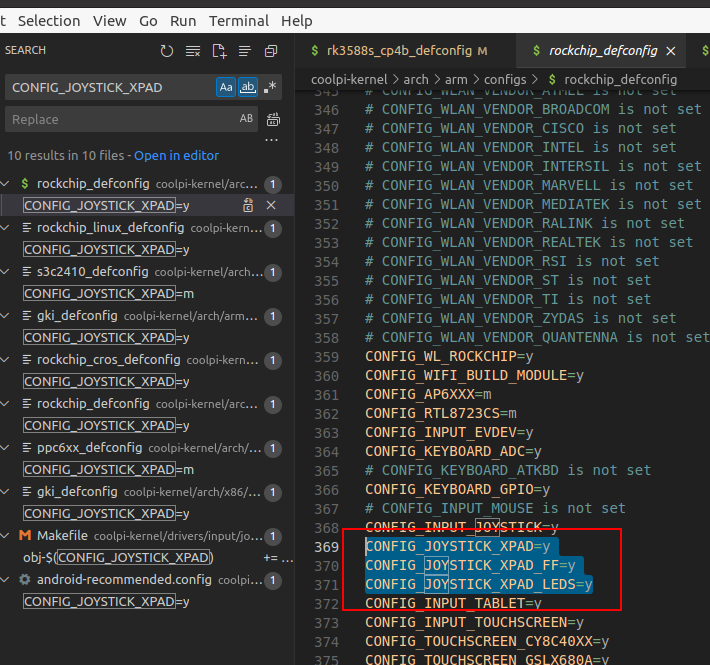
我也不管,全部复制进rk3588s_cp4b_defconfig,重新编译后,更新内核可以成功。

@大法师 谢谢!搞定了
ubuntu 20没有/etc/rc.local,需要
[Unit]
Description=/etc/rc.local Compatibility
ConditionPathExists=/etc/rc.local
[Service]
Type=forking
ExecStart=/etc/rc.local start
TimeoutSec=0
StandardOutput=tty
RemainAfterExit=yes
SysVStartPriority=99
[Install]
WantedBy=multi-user.target
2.使能service
sudo systemctl enable rc-local.service
3.新建/etc/rc.local
sudo vim /etc/rc.local
并需要操作的命令加进去
4.启动服务
sudo systemctl start rc-local.service
sudo systemctl status rc-local.service