已编译好的deb包,直接安装验证
sudo dpkg -i coolpi-kernel_1.0.0_aarch64.deb
sudo reboot

已编译好的deb包,直接安装验证
sudo dpkg -i coolpi-kernel_1.0.0_aarch64.deb
sudo reboot
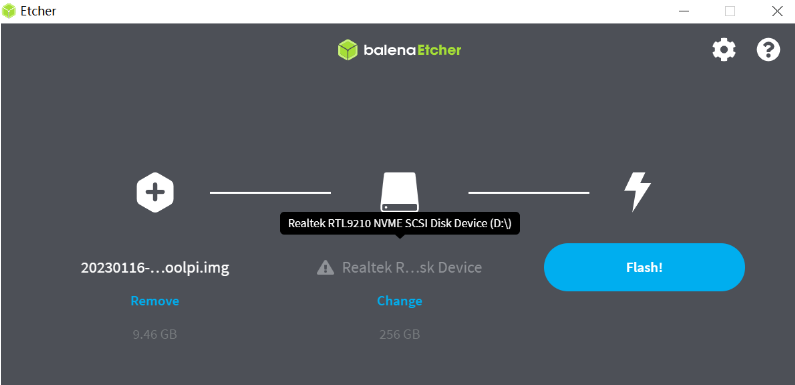
Burn system image to nvme ssd.
速度飞快!实际使用中发现这个转接模块在无操作时会自动休眠,导致系统阻塞
coolpi@coolpi:~$ lsusb
Bus 008 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
Bus 007 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Bus 006 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
Bus 005 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Bus 004 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub
Bus 002 Device 002: ID 0bda:9210 Realtek Semiconductor Corp. RTL9210
Bus 002 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Bus 003 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub
Bus 001 Device 002: ID 1a86:8091 QinHeng Electronics USB HUB
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
coolpi@coolpi:~$


暂时未重新打包刷机镜像,可以先独立更新内核驱动包。
coolpi@coolpi:~$ sudo dpkg -i coolpi-kernel_1.0.0_aarch64.deb
coolpi@coolpi:~$ sync
coolpi@coolpi:~$ sudo reboot
重启系统,如有连接ov5647摄像头,可以识别到video设备。
coolpi@coolpi:~$ sudo apt install v4l-utils
coolpi@coolpi:~$ v4l2-ctl --list-devices
rkisp-statistics (platform: rkisp):
/dev/video18
/dev/video19
rkcif (platform:rkcif-mipi-lvds2):
/dev/video0
/dev/video1
/dev/video2
/dev/video3
/dev/video4
/dev/video5
/dev/video6
/dev/video7
/dev/video8
/dev/video9
/dev/video10
rkisp_mainpath (platform:rkisp0-vir0):
/dev/video11
/dev/video12
/dev/video13
/dev/video14
/dev/video15
/dev/video16
/dev/video17
@顾真牛 系统切换是支持的,这部分可以在boot分区修改extlinux.conf文件实现。理论上用户自行创建多个rootfs分区,通过相应分区label区分,切换系统也比较容易实现。
当然uboot源码我们也是开放的,大家都可以根据需要修改
@bg8wj 谢谢!我们验证好了会同步发布出来。这款主板还有很多功能可以挖掘,需要更多的伙伴一起共赢!
When system (like ubuntu desktop) is running, we can press power key to poweroff system or restart system.
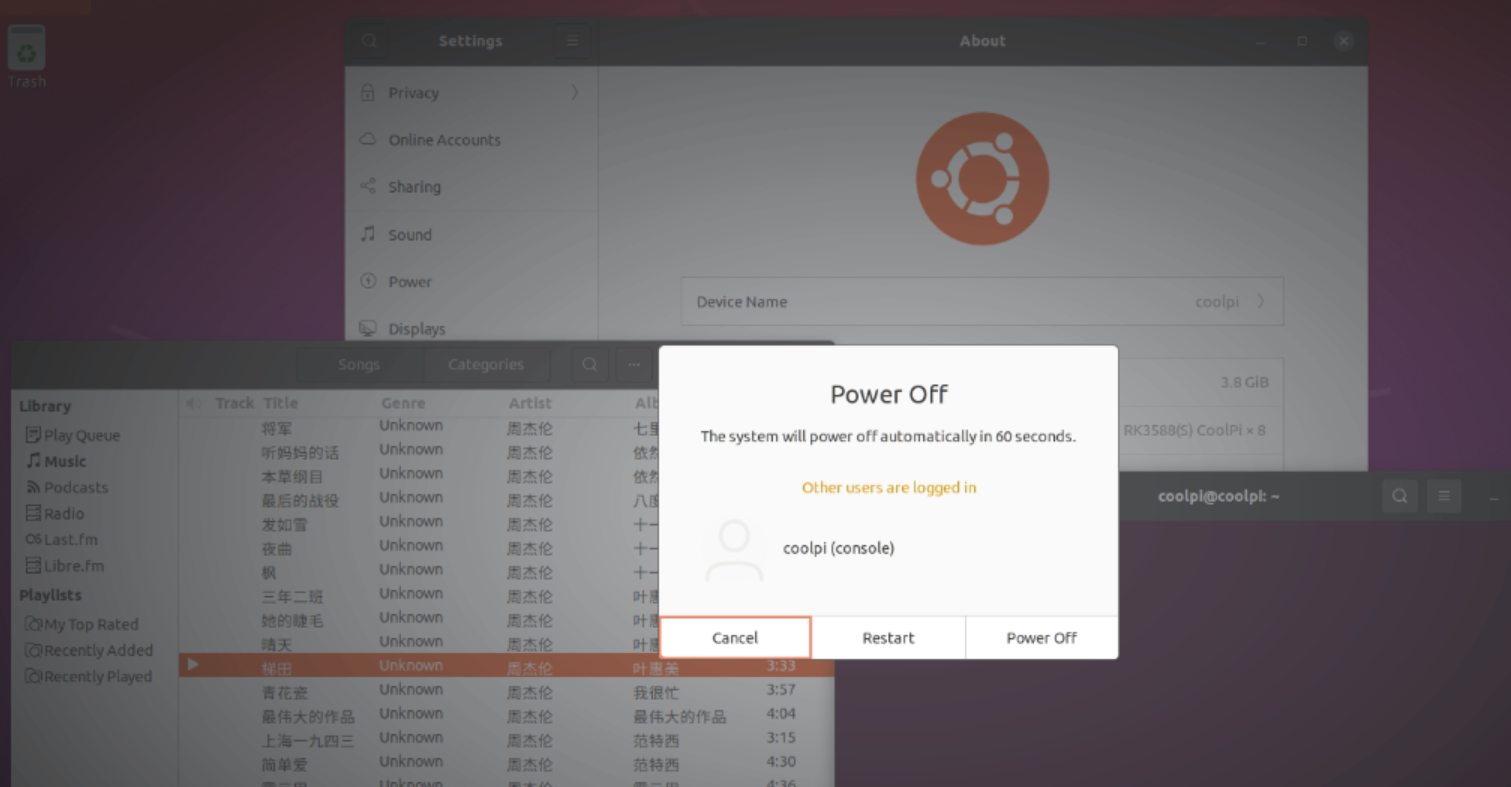
if want to skip select option, you can set in the terminal shell:
coolpi@coolpi:~$ gsettings set org.gnome.settings-daemon.plugins.power power-button-action interactive
coolpi@coolpi:~$ gsettings set org.gnome.SessionManager logout-prompt false
@bg8wj github已更新内核驱动代码。二进制执行文件明天测试好再上传
root@coolpi:/home/coolpi# ls -l /dev/video*
crw-rw----+ 1 root video 81, 0 Jan 27 23:26 /dev/video0
crw-rw----+ 1 root video 81, 1 Jan 27 23:26 /dev/video1
crw-rw----+ 1 root video 81, 10 Jan 27 23:26 /dev/video10
crw-rw----+ 1 root video 81, 11 Jan 27 23:26 /dev/video11
crw-rw----+ 1 root video 81, 12 Jan 27 23:26 /dev/video12
crw-rw----+ 1 root video 81, 13 Jan 27 23:26 /dev/video13
crw-rw----+ 1 root video 81, 14 Jan 27 23:26 /dev/video14
crw-rw----+ 1 root video 81, 15 Jan 27 23:26 /dev/video15
crw-rw----+ 1 root video 81, 16 Jan 27 23:26 /dev/video16
crw-rw----+ 1 root video 81, 17 Jan 27 23:26 /dev/video17
crw-rw----+ 1 root video 81, 18 Jan 27 23:26 /dev/video18
crw-rw----+ 1 root video 81, 19 Jan 27 23:26 /dev/video19
crw-rw----+ 1 root video 81, 2 Jan 27 23:26 /dev/video2
crw-rw----+ 1 root video 81, 3 Jan 27 23:26 /dev/video3
crw-rw----+ 1 root video 81, 4 Jan 27 23:26 /dev/video4
crw-rw----+ 1 root video 81, 5 Jan 27 23:26 /dev/video5
crw-rw----+ 1 root video 81, 6 Jan 27 23:26 /dev/video6
crw-rw----+ 1 root video 81, 7 Jan 27 23:26 /dev/video7
crw-rw----+ 1 root video 81, 8 Jan 27 23:26 /dev/video8
crw-rw----+ 1 root video 81, 9 Jan 27 23:26 /dev/video9
lrwxrwxrwx 1 root root 7 Jan 27 23:26 /dev/video-camera0 -> video11
root@coolpi:/home/coolpi#
root@coolpi:/home/coolpi# dmesg | grep ov564
[ 11.285152] ov5648 8-0036: driver version: 00.01.05
[ 11.285181] ov5648 8-0036: Failed to get power-gpios, maybe no use
[ 11.285193] ov5648 8-0036: Failed to get reset-gpios, maybe no use
[ 11.285205] ov5648 8-0036: Failed to get pwdn-gpios
[ 11.285305] ov5648 8-0036: supply dovdd not found, using dummy regulator
[ 11.285372] ov5648 8-0036: supply dvdd not found, using dummy regulator
[ 11.285409] ov5648 8-0036: lane_num(2) pixel_rate(84000000)
[ 11.285416] ov5648 8-0036: could not get default pinstate
[ 11.290827] ov5648 8-0036: could not get sleep pinstate
[ 11.299689] ov5648 8-0036: Detected OV005647 sensor
[ 11.299707] rockchip-csi2-dphy csi2-dphy0: dphy0 matches m01_f_ov5648 8-0036:bus type 5
root@coolpi:/home/coolpi#