-
root登录shell键入如下命令:
root@ubuntu:/# wget http://fishros.com/install -O fishros && bash fishros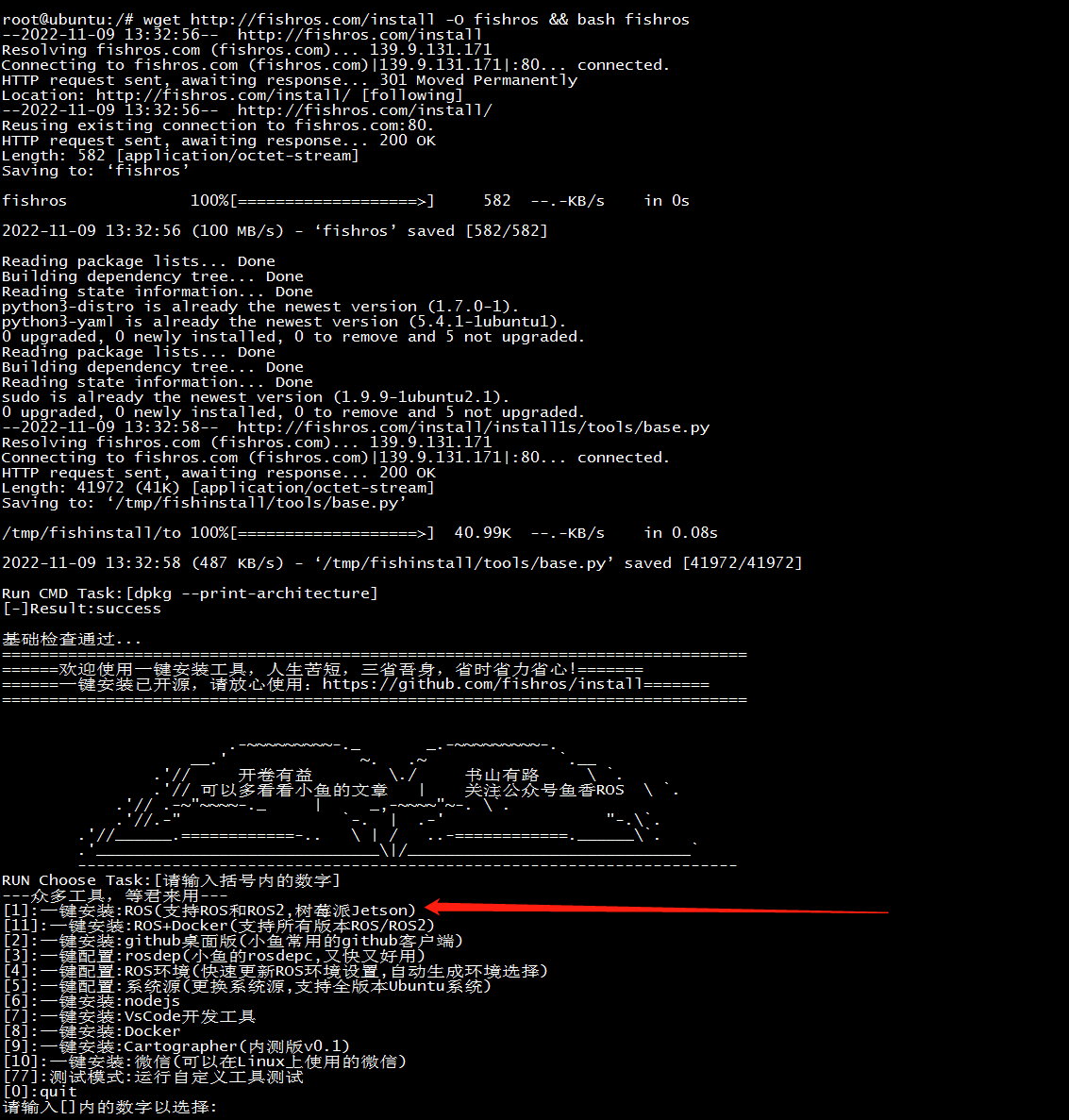
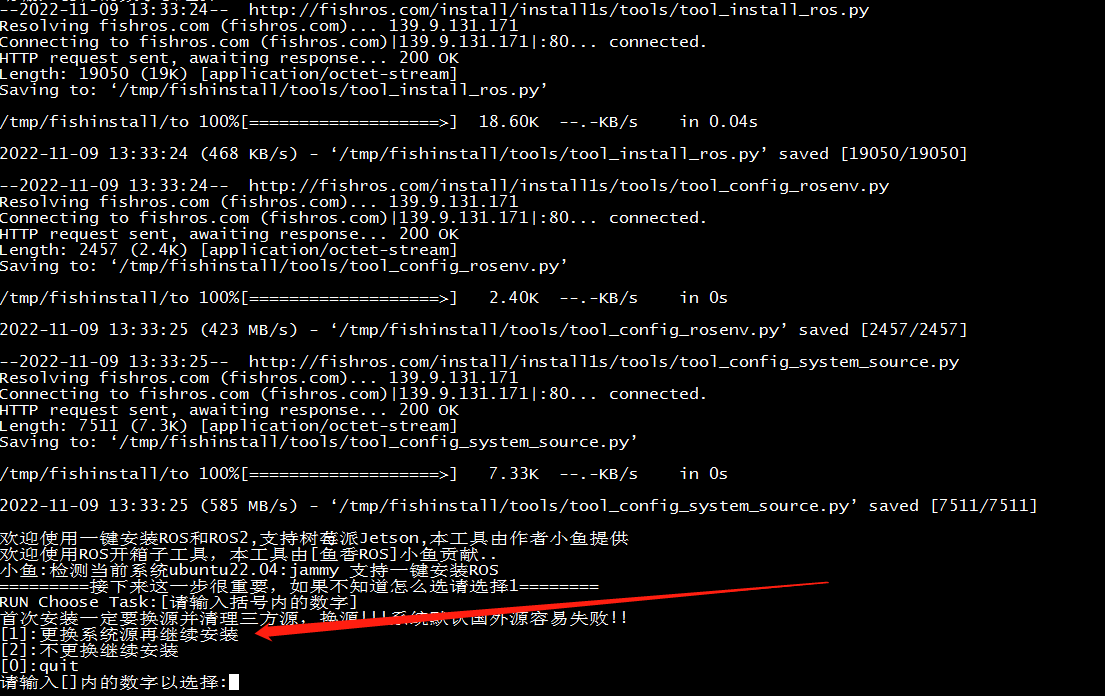
选择更新源速度会大幅度提高
选择humble

选择桌面版

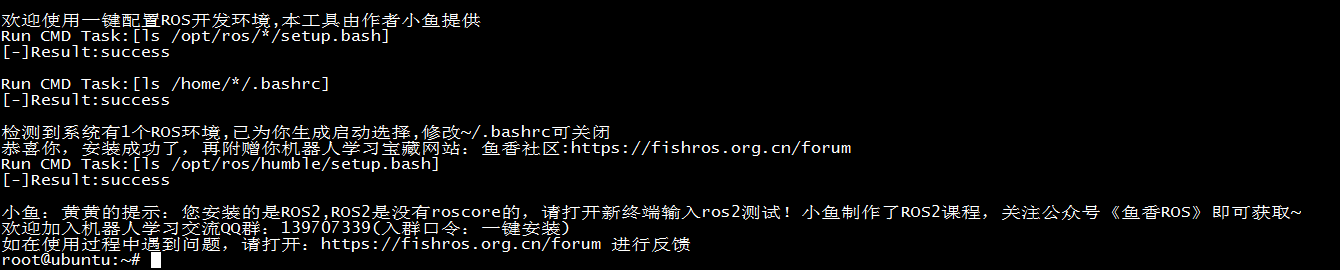
安装成功界面
简单测试:
两个shell终端分别输入下面两条指令$ros2 run demo_nodes_py listener $ros2 run demo_nodes_cpp talker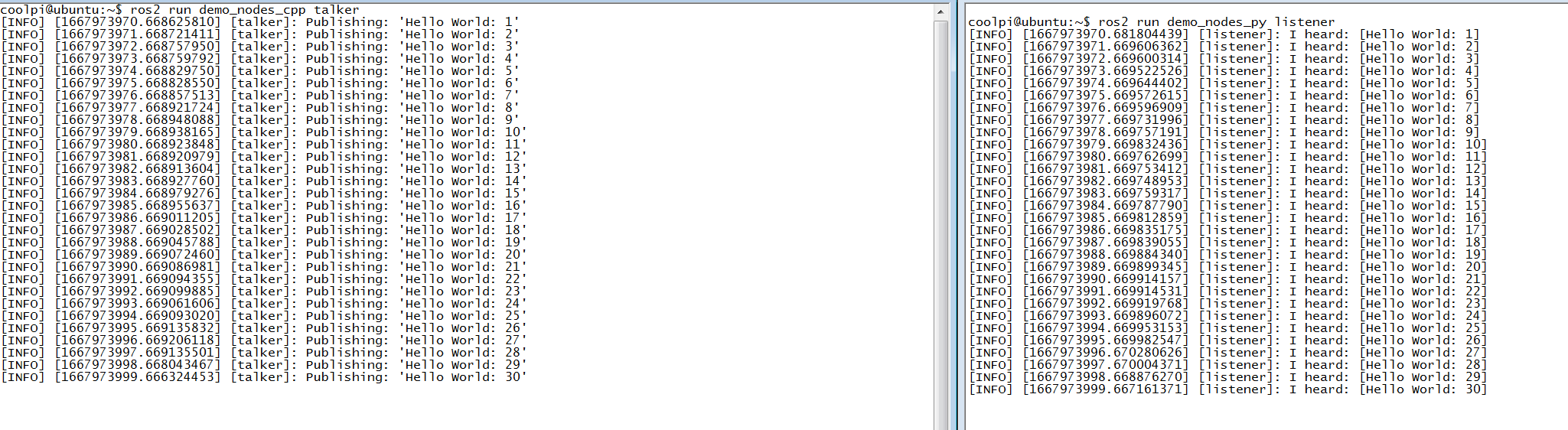
小乌龟测试:
两个shell终端分别输入下面两条指令$ ros2 run turtlesim turtlesim_node $ ros2 run turtlesim turtle_teleop_key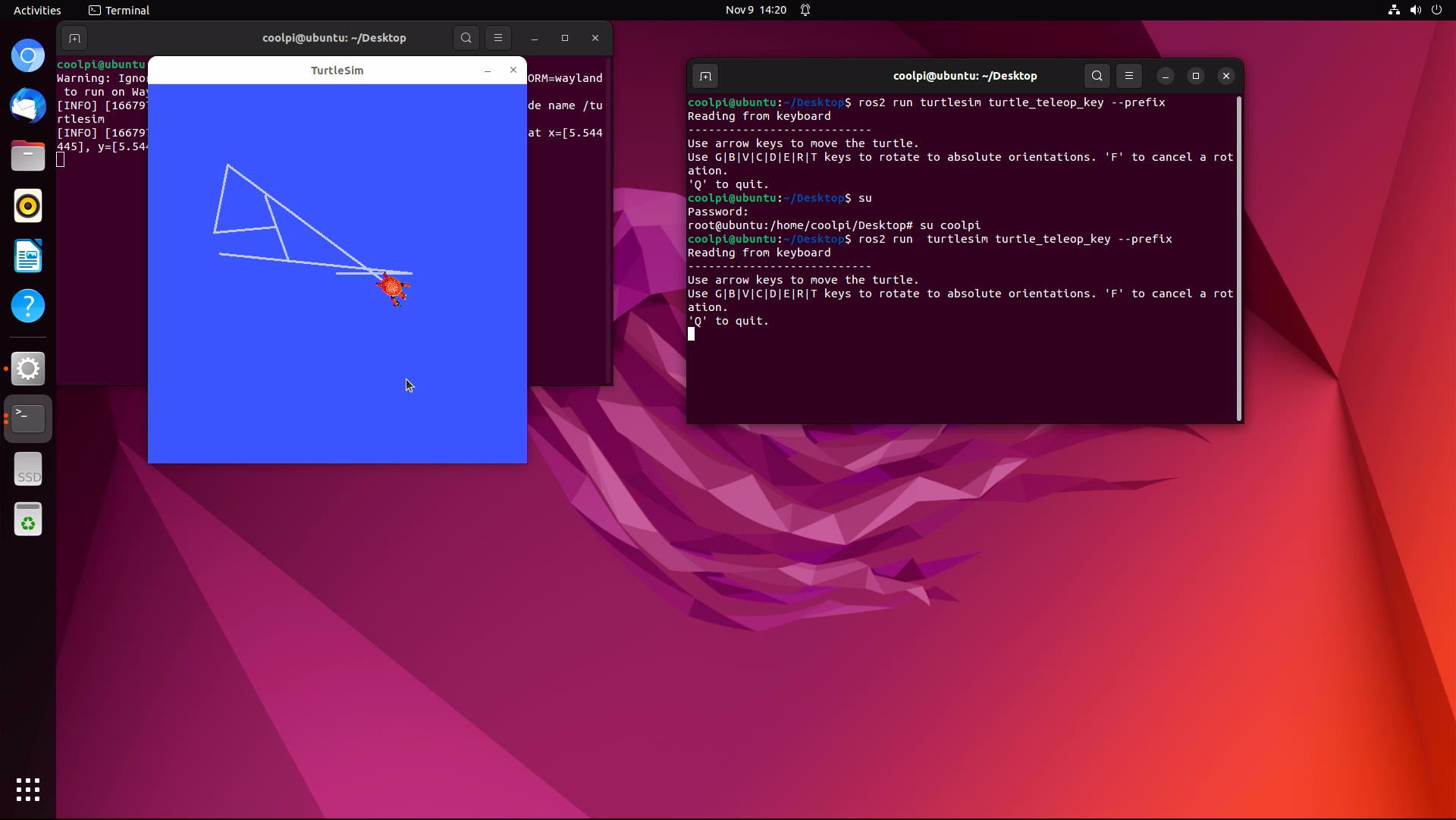
-
 大 大法师 referenced this topic on
大 大法师 referenced this topic on
-
G george referenced this topic on
-
L LinuxRk3588 referenced this topic on